Hierarchical Planning with Latent World Models
Key Contributions
- Hierarchical MPC in a shared latent space, enabling direct subgoal transfer across levels without policies, skills, or task-specific rewards
- Unlocks zero-shot non-greedy planning from images, achieving 70% success on real-robot pick-and-place from a single goal image (vs. 0% for flat VJEPA2-AC planner)
- Model-agnostic planning abstraction, consistently improving diverse latent world models (VJEPA2-AC, DINO-WM, PLDM)
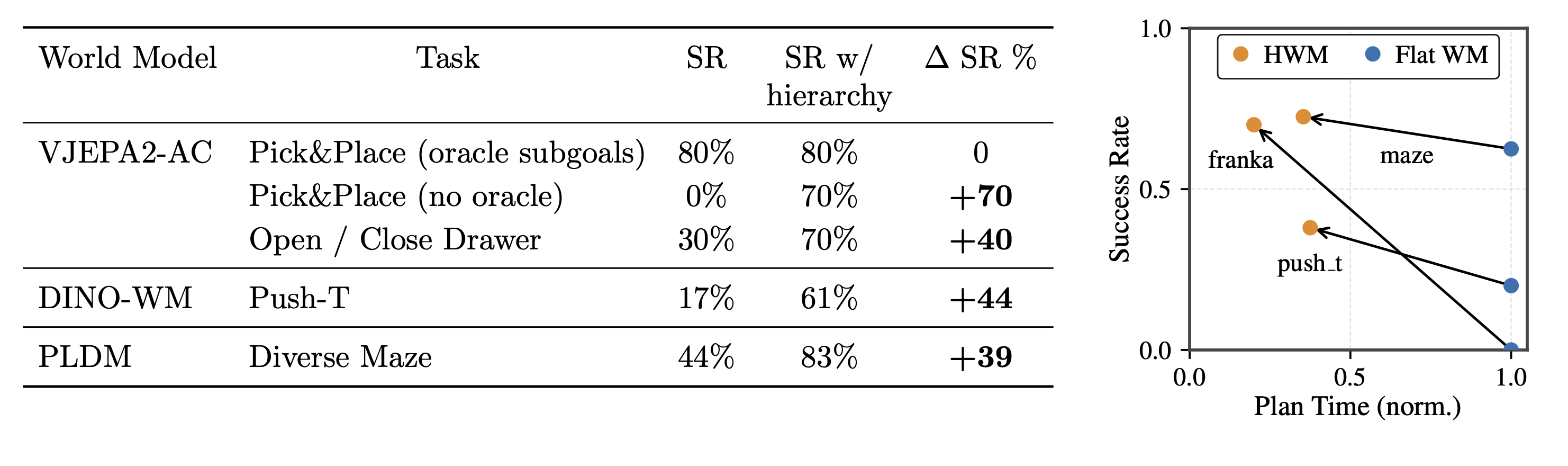
- Better performance and efficiency on long-horizon tasks, with up to +44% absolute success rate gains and up to 4x lower planning cost
Abstract
World models are a promising path to zero-shot embodied control through planning. However, existing world model planners struggle on long-horizon, multi-stage tasks: prediction errors compound and naive search is exponential in the planning horizon. Hierarchy mitigates both by decomposing tasks into shorter, tractable subproblems; yet prior hierarchical approaches either amortize control into task-specific policies (hierarchical RL) or assume low-dimensional states and known dynamics (classical hierarchical MPC). We present Hierarchical Planning with Latent World Models (HWM), an architecture and planning paradigm for hierarchical model predictive control (MPC) directly on visual world models trained solely via next-latent prediction. HWM learns world models at multiple temporal scales within a shared latent space, so predictions from the long horizon model serve as subgoals for the short horizon model via latent matching without task-specific rewards, skill learning, or hierarchical policies. To keep long-horizon search tractable, HWM learns an action encoder that compresses primitive action chunks into latent macro-actions. On real-world Franka manipulation, HWM solves pick-and-place from a single goal image at 70% success vs. 0% for single-level planning. Across simulated push manipulation and maze navigation, HWM consistently improves performance on long-horizon tasks while requiring up to 3× less planning compute.
Hierarchical Planning
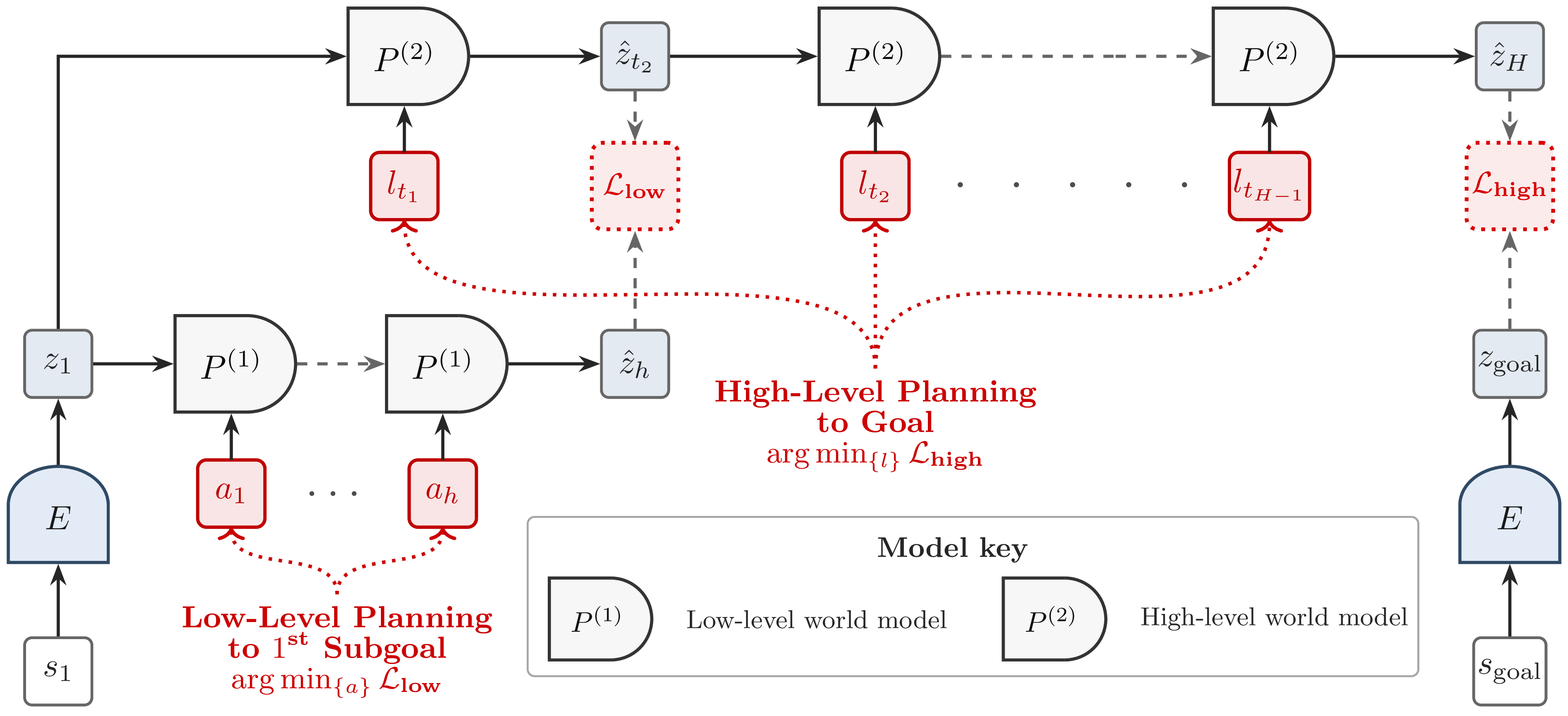
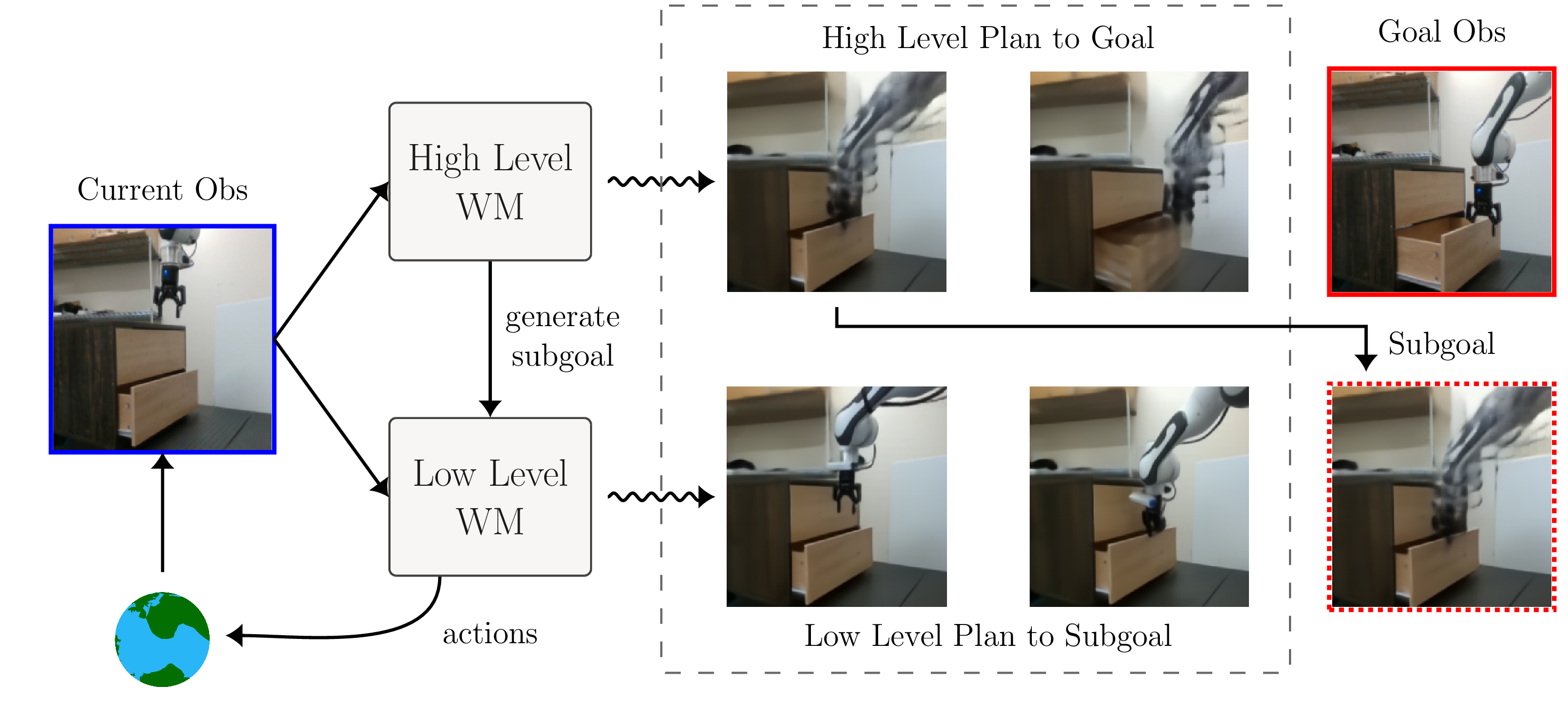
A high-level planner optimizes macro actions using a long-horizon latent world model to reach the final goal embedding. The resulting first predicted latent state serves as a subgoal for low-level planning, where a short-horizon world model optimizes primitive actions to reach this subgoal.
Training
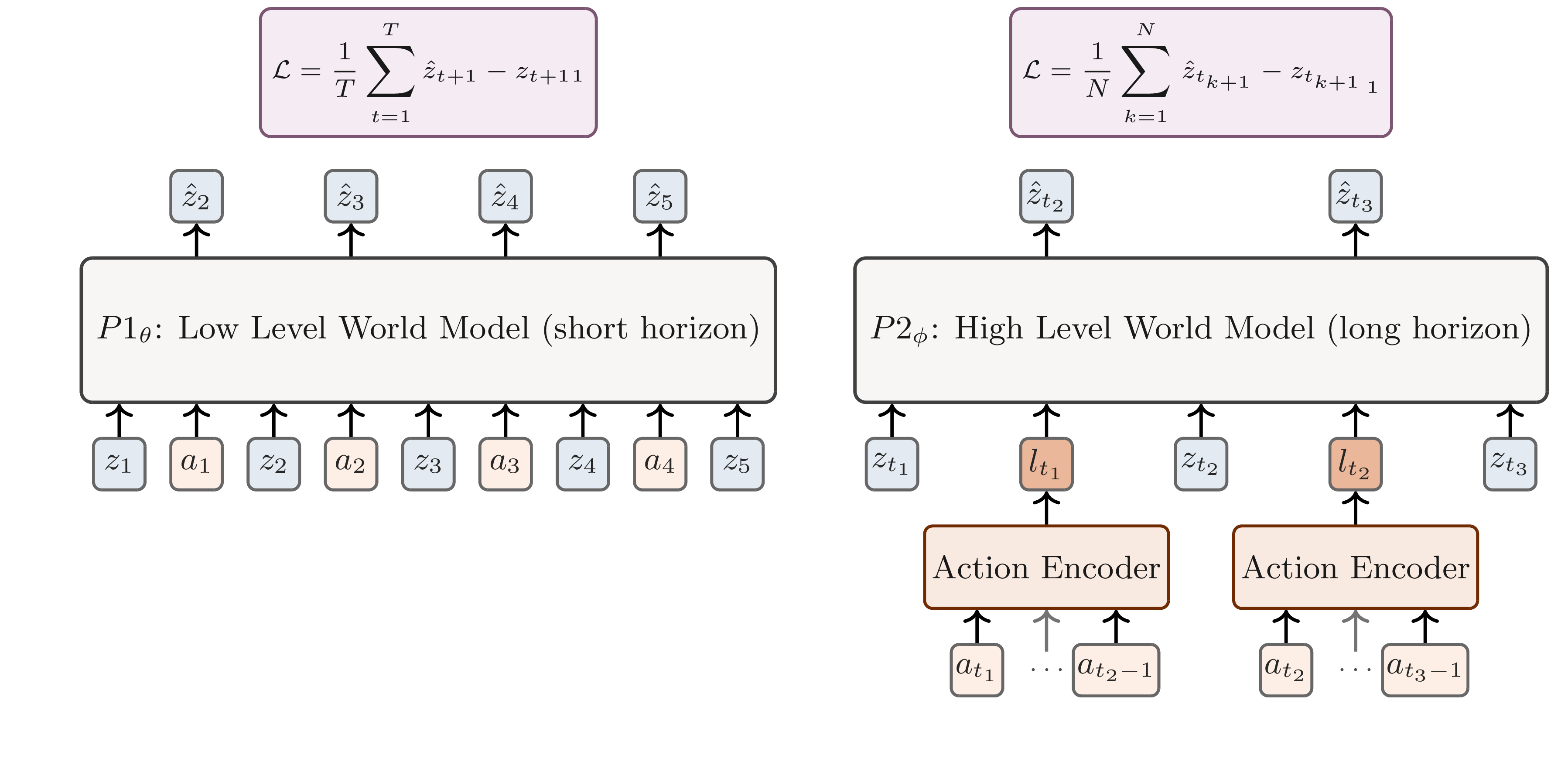
Training latent world models at multiple timescales. We train two predictors that operate in a shared latent space but at different temporal resolutions. The low-level predictor models short-horizon dynamics conditioned on latent states and primitive actions, producing step-by-step predictions of future latents. The high-level predictor models long-horizon dynamics via latent macro-actions, which are obtained by encoding sequences of low-level actions via an action encoder. Both predictors operate causally and are trained with an $\ell_1$ latent prediction loss.
Main Results
Hierarchical Planning with VJEPA2-AC: Pick-&-Place w/ Franka Arm

Zero-shot robotic manipulation with Franka dual-gripper, including pick-and-place and drawer manipulation. Single-level planner (VJEPA2-AC) succeeds only when the task is explicitly decomposed into greedy subtasks via manually provided subgoals. In contrast, hierarchical planning enables end-to-end task execution using only a final goal image.
Hierarchical Planning with DINO-WM: Push T


Left: Push-T Performance Across Task Horizons. In each trial, a random start-goal pair d. Right: Hierarchical planning achieves higher success while using up to 3x less test-time compute than flat planners. timesteps apart is sampled from a validation trajectory.
Hierarchical Planning with PLDM: Maze Navigation


Left: Diverse Maze Performance Across Task Horizons. Agents are evaluated zero-shot on navigation tasks in test maps with layouts unseen during training. Start and goal positions are randomly sampled at varying grid distances. Right: Hierarchical planning achieves higher success while using up to 3x less test-time compute than flat planners.